ZV4IS – Zero vibration input shaper
Block SymbolLicensing group: ADVANCED

Function Description
The function block ZV4IS implements a band-stop frequency filter. The main field of
application is in motion control of flexible systems where the low stiffness of mechanical
construction causes an excitation of residual vibrations which can be observed in form of
mechanical oscillations. Such vibration can cause significant deterioration of quality of control
or even instability of control loops. They often lead to increased wear of mechanical
components. Generally, the filter can be used in arbitrary application for a purpose of control
of an oscillatory system or in signal processing for selective suppression of particular
frequency.
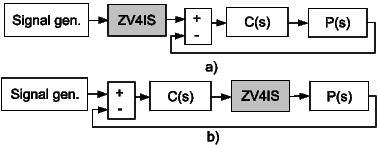
The input shaping filter can be used in two different ways. By using an open loop connection, the input reference signal for an feedback loop coming from human operator or higher level of control structure is properly shaped in order to attenuate any unwanted oscillations. The internal dynamics of the filter does not influence a behaviour of the inferior loop. The only condition is correct tuning of feedback compensator , which has to work in linear mode. Otherwise, the frequency spectrum of the manipulating variable gets corrupted and unwanted oscillations can still be excited in a plant . The main disadvantage is passive vibration damping which works only in reference signal path. In case of any external disturbances acting on the plant, the vibrations may still arise. The second possible way of use is feedback connection. The input shaper is placed on the output side of feedback compensator and modifies the manipulating variable acting on the plant. An additional dynamics of the filter is introduced and the compensator needs to be properly tuned.
The algorithm of input shaper can be described in time domain
Thus, the filter has a structure of sum of weighted time delays of an input signal. The gains and time delay values depend on a choice of filter type, natural frequency and damping of controlled oscillatory mode of the system. The main advantage of this structure compared to commonly used notch filters is finite impulse response (which is especially important in motion control applications), warranted stability and monotone step response of the filter and generally lower dynamic delay introduced into a signal path.
For correct function of the filter, natural frequency omega and damping xi of the oscillatory mode need to be set. The parameter ipar sets a filter type. For , one of ten basic filter types chosen by istype is used. Particular basic filters differ in shape and width of stop band in frequency domain. In case of precise knowledge of natural frequency and damping, the ZV (Zero Vibration) or ZVD filters can be used, because their response to input signal is faster compared to the other filters. In case of large uncertainty in system/signal model, robust UEI (Extra Insensitive) or UTHEI filters are good choice. Their advantage is wider stopband at the cost of slower response. The number on the end of the name has the meaning of maximum allowed level of excited vibrations for the given omega and xi (one, two or five percent).
For precise tuning of the filter, complete parameterization can be selected. For this choice, three parameters p_alpha,p_a2 and p_a3 which affect the shape of the filter frequency response can freely be assigned. These parameters can be used for finding of optimal compromise between robustness of the filter and introduced dynamical delay.
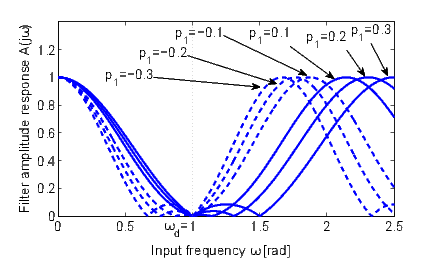
The asymmetry parameter p_alpha determines relative location of the stopband of filter frequency response with respect to chosen natural frequency. Positive values mean a shift to higher frequency range, negative values to lower frequency range, zero value leads to symmetrical shape of the characteristic (see the figure above). The parameter p_alpha also affects the overall filter length, thus the overall delay introduced into a signal path. Lower values result in slower filters and higher delay. Asymmetric filters can be used in cases where a lower or higher bound of the uncertainty in natural frequency parameter is known.
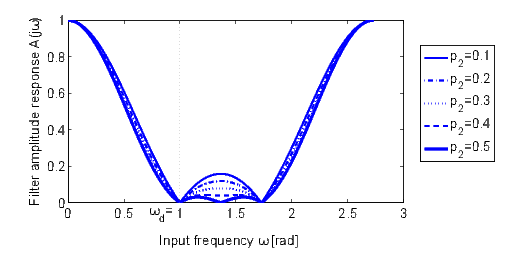
Insensitivity parameter p_a2 determines the width and attenuation level of the filter stopband. Higher values result in wider stopband and higher attenuation. For most applications, the value is recommended for highest achievable robustness with respect to modeling errors.
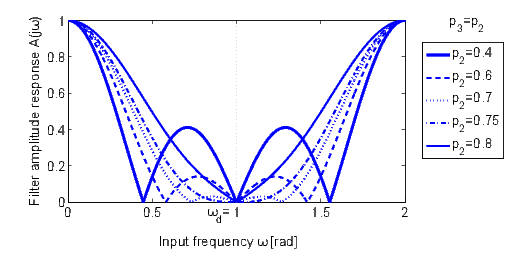
The additional parameter p_a3 needs to be chosen for symmetrical filters (). A rule for the most of the practical applications is to chose equal values from interval . Overall filter length is constant for this choice and only the shape of filter stopband is affected. Lower values lead to robust shapers with wide stopband and frequency response shape similar to standard THEI (Two-hump extra insensitive) filters. Higher values lead to narrow stopband and synchronous drop of two stopband peaks. The choice results in standard ZVDD filter with maximally flat and symmetric stopband shape. The proposed scheme can be used for systematic tuning of the filter.
Input
u | Input signal to be filtered | Double (F64) |
Outputs
y | Filtered output signal | Double (F64) |
E | Error flag | Bool |
|
|
|
Parameters
omega | Natural frequency 1.0 | Double (F64) |
xi | Relative damping coefficient | Double (F64) |
ipar | Specification 1 | Long (I32) |
|
|
|
istype | Type 2 | Long (I32) |
|
|
|
p_alpha | Shaper duration/assymetry parameter 0.2 | Double (F64) |
p_a2 | Insensitivity parameter 0.5 | Double (F64) |
p_a3 | Additional parameter (only for ) 0.5 | Double (F64) |
nmax | Size of data buffer (number of samples). Used for internal memory allocation. 10 10000000 1000 | Long (I32) |
[Previous] [Back to top] [Up]
2022 © REX Controls s.r.o., www.rexygen.com