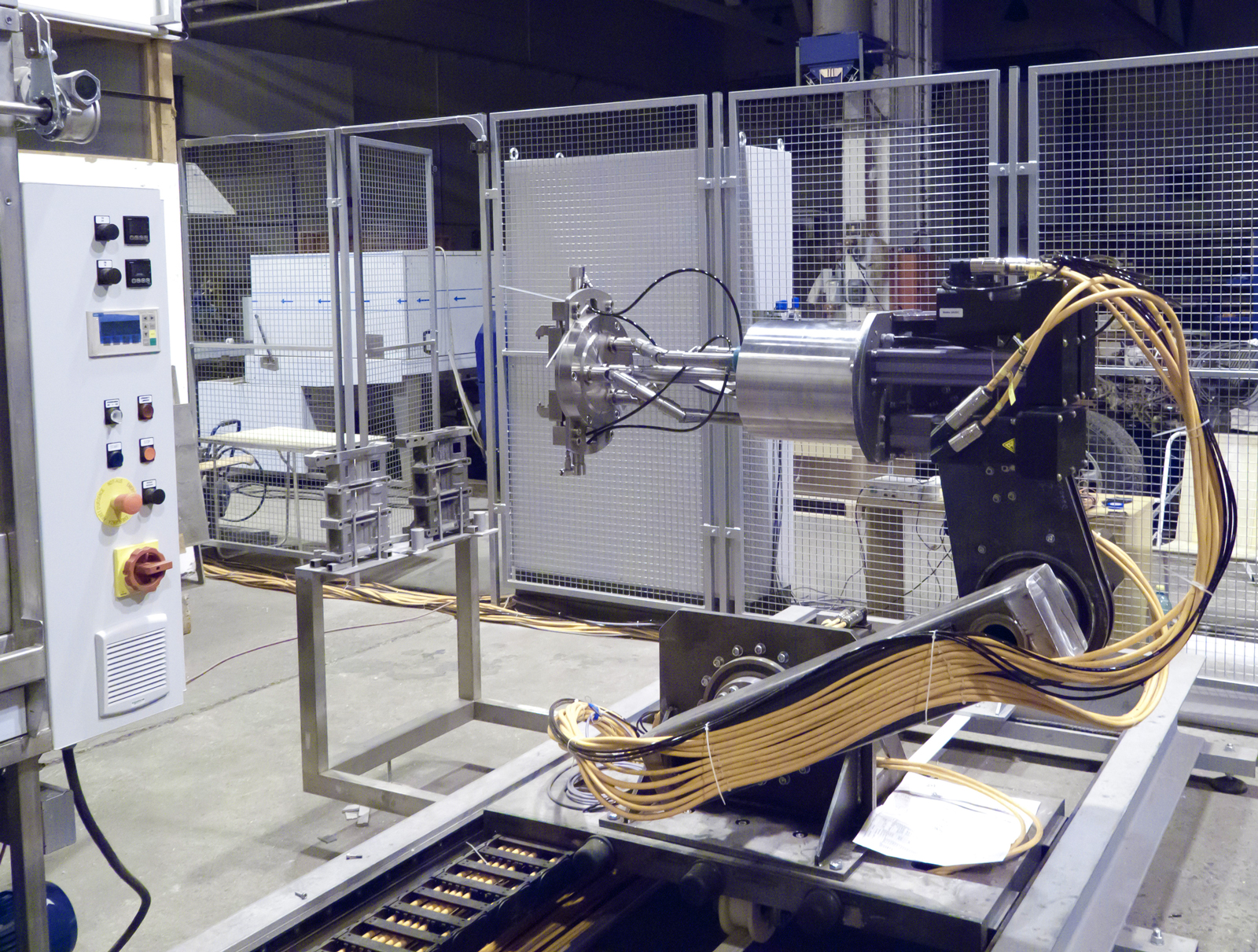
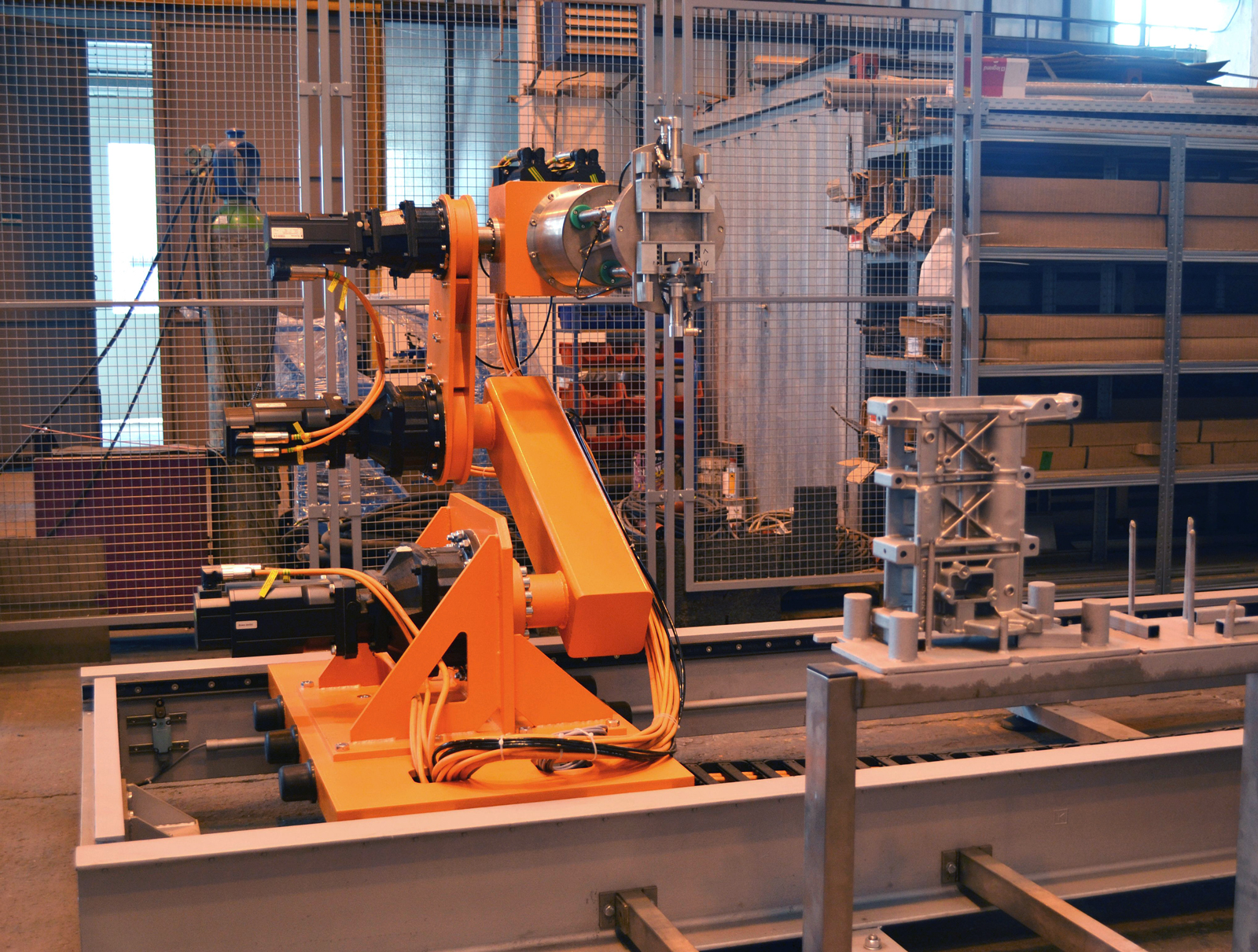
Based on REXYGEN the control system for robotic manipulator AGEBOT (AGgressive environment roBOT) was developed. The manipulator uses special serio-parallel kinematic architecture, which was designed for applications in chemically aggressive environment. Commonly used industrial robots available on the market cannot be used in such cases because of possibility of destruction or severe damage of vulnerable components of the machine (electronics, sensors and actuators) due to the contact with strong chemicals. The developed manipulator uses special three degrees of freedom parallel spherical wrist, which allows to place all the vulnerable components out of the effector space. The motion of the wrist is realized using a system of linear actuators and cardan joints. The developed manipulator is equipped with automatic computer control system which allows to define and parameterize desired motions and human-machine interface for supervision and control by a human operator. The primary application for the robot is technology of industrial degreasing and paint removing which is supplied by company EuroTec JKR. However, it is possible to adapt the robot easily for different tasks thanks to universal communication interface which allows a connection to arbitrary supervisory technological control system using some standardized serial communication protocol. The manipulator was developed by EuroTec JKR and UWB.
{kind=link}
{kind=link}
{kind=link}